|
Yuan Jiang I did my Master's in Robotics, Systems and Control at ETH Zürich, where I worked on a variety of projects in the topics of computer vision, robotic hand, and learning robot control. My master's thesis on multi-agent VSLAM was supervised by Dr. Marco Karrer, Dr. David Hug, and Prof. Dr. Margarita Chli. I've worked on Reinforcement Learning for Robotics in several projects as well. I also had the chance to work at BMW Munich on 6D Pose Estimation pipelines to automate internal logistics for BMW factory's sequencing process. I obtained my Bachelor's degree in Mechanical Engineering from HUST, where I did my thesis in Medical Image Analysis and Augmented Reality Group, supervised by Prof. Dr. Xin Yang. |

|
Thesis |
|
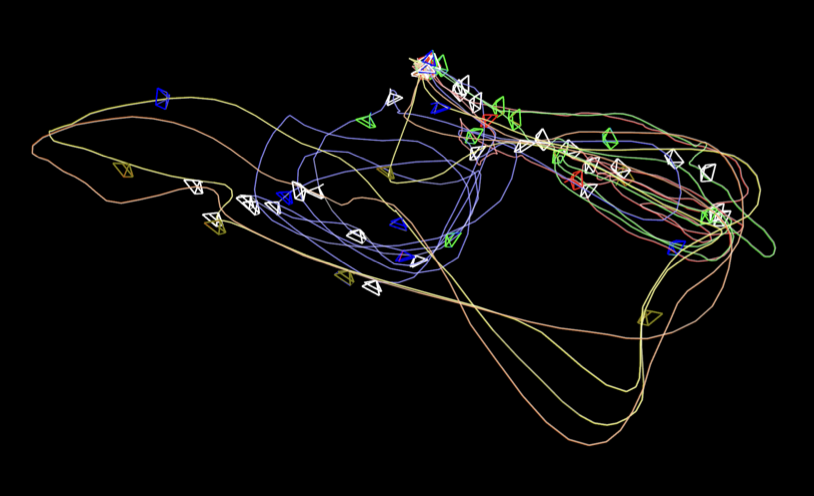
Decentralized Collaborative SLAM with Map Reuse
Master Thesis, ETH Zürich, 2023 Supervised by Dr. Marco Karrer, David Hug, and Prof. Dr. Margarita Chli. We integrated decentralized Pose Graph Optimization into the existing Decentralized Collaborative SLAM system, which features map reuse. |

|
Learning Recovery Behaviour in Cluttered Environments
Semester Thesis, ETH Zürich, 2022 Supervised by Joonho Lee and Takahiro Miki. We applied privileged learning framework to train a robust recovery controller for quadrupedal robot that recovers in cluttered environments upon falling. The policy was deployed on the robot Anymal C. |
Projects |
|
State Based DeepRL Drone Tracking
Vision Based Drone Flight, ETH Zürich, 2024 We trained a state-based deep reinforcement learning policy that enables a drone to track another flying drone. |
|
SnapHand
Real World Robotics, ETH Zürich, 2023 We designed and built a low cost tendon driven biomimetic robotic hand from scratch. The novel snap-fit pin joint enables easy installation and safety measures. The robotic hand also has vision-based teleoperation and RL-based ball rolling capabilities. |
|
Robotic Ball Balancing System
Introduction to Robotics and Mechatronics, ETH Zürich, 2021 Wrote a PID controller for a robotic ball balancing system with 3 degree of freedom based on Featherboard. |
|
What's next? |